LoCO-AUV
Relevant Publications:
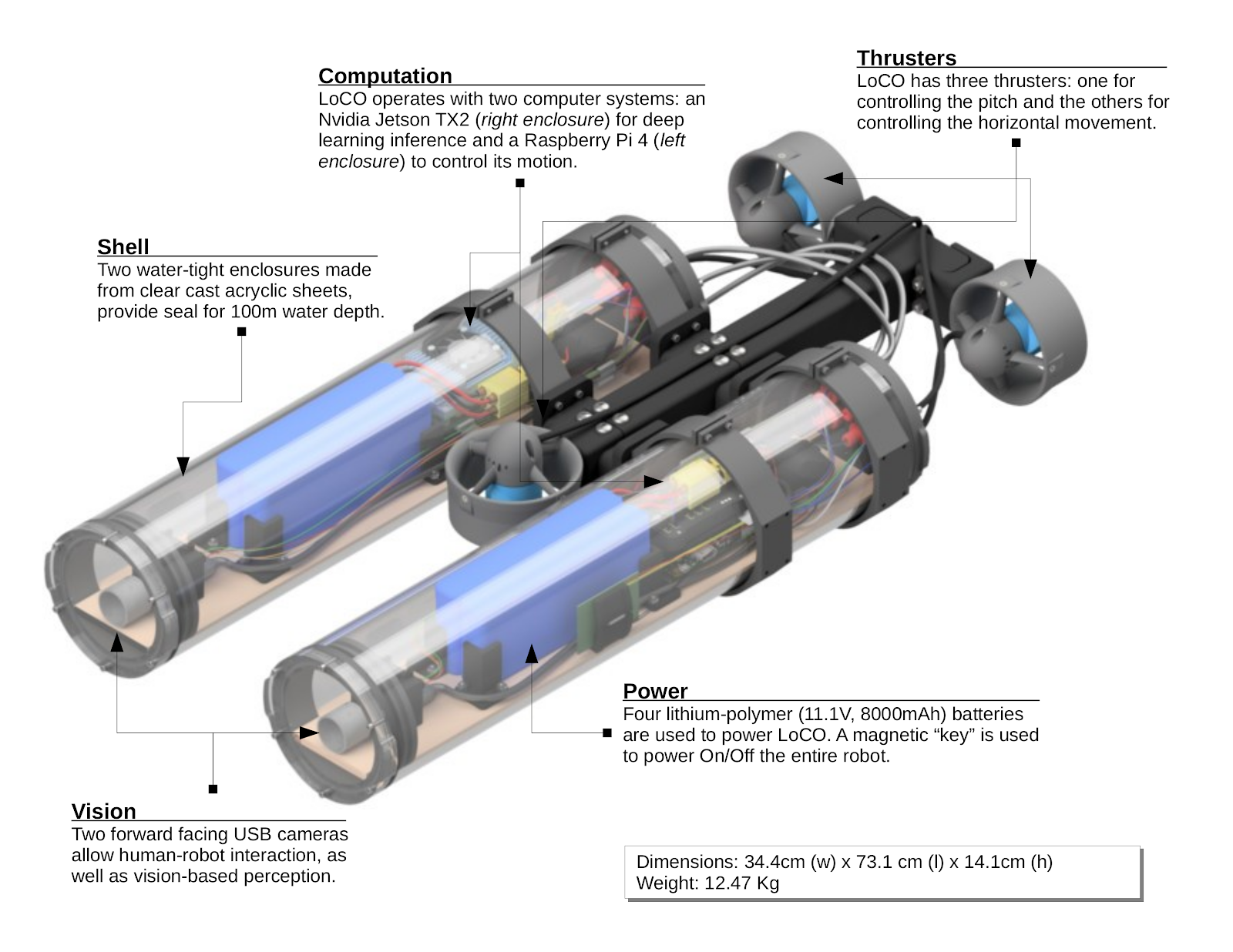
IROS-20I helped to design and develop the Low Cost, Open-Source Autonomous Underwater Vehicle: LoCO. As one of the students who developed the original concept, I was involved from the beginning of the project, helping to select the hardware used, laying down the foundational principles of LoCO’s design and operation. I also helped to make LoCO autonomous by creating the first autopilot software in use on the robot, along with a host of human-robot interaction capabilities. LoCO’s design and code is all free and available online! Build one yourself, and join the LoCO community!